Researchers have created a robot that can morph its legs into flippers through a process they dubbed “adaptive morphogenesis.”
The robot, ART (Amphibious Robotic Turtle), takes inspiration from water and land turtles, a group whose fossil record spans over 110 million years.
A paper on the project appears in Nature.

“Terrestrial and aquatic turtles share similar bodies, with four limbs and a shell, but have distinctive limb shapes and gaits adapted for their specific environment,” says Rebecca Kramer-Bottiglio, associate professor of mechanical engineering and materials science and principal investigator of the study.
“Sea turtles have elongated flippers for swimming, whereas land turtles and tortoises have rounded legs for load bearing while walking,” Kramer-Bottiglio says.
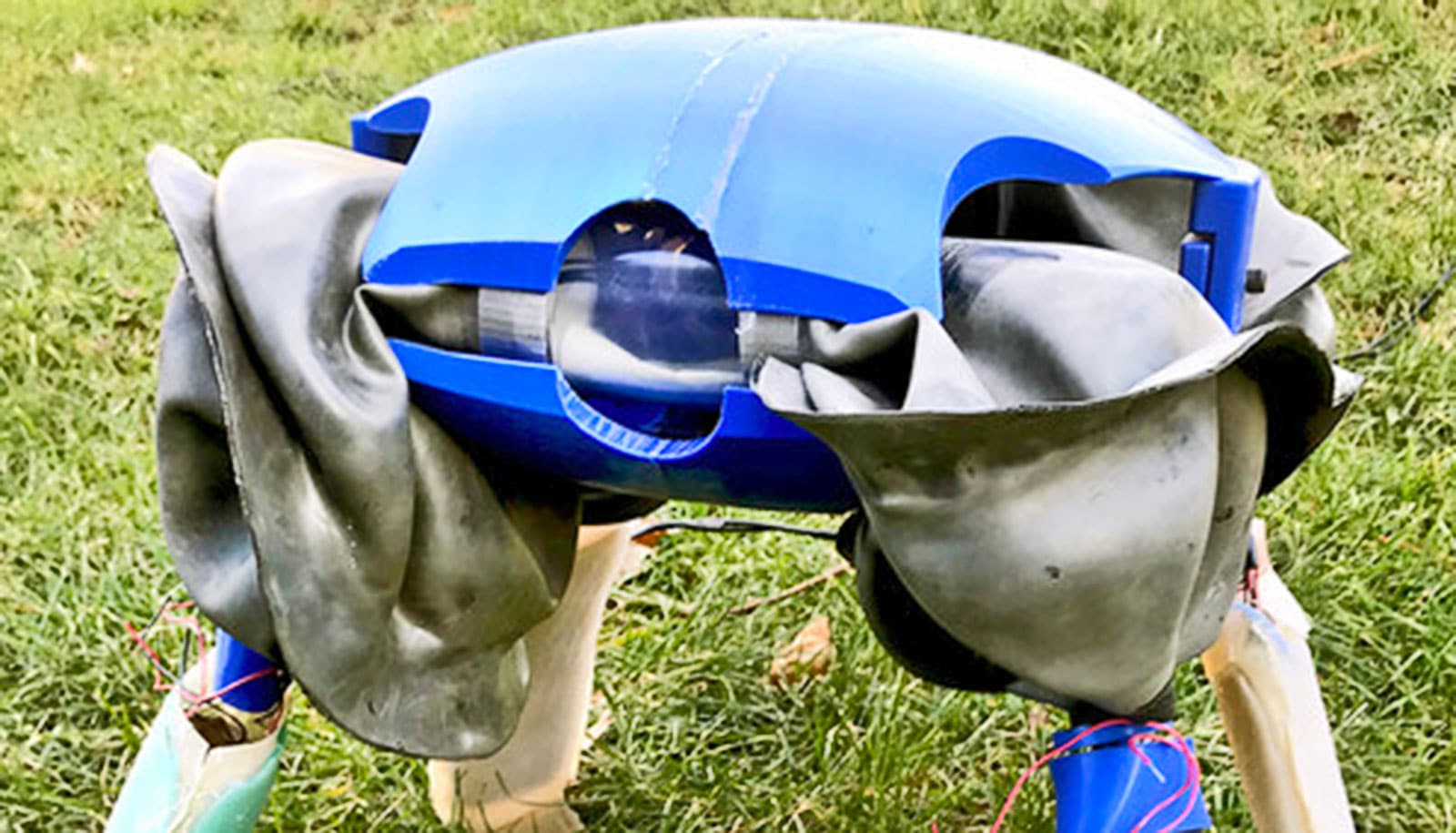
The robot features morphing limbs that can adapt their shape, stiffness, and behavior to the environment. The limbs use variable stiffness materials and artificial muscles to transform their shape when transitioning from one environment to another.
In its legged state, ART can traverse land with a variety of four-legged terrestrial gaits. Upon reaching a body of water, ART can then morph its legs into flippers, enabling it to swim with lift- and drag-based aquatic gaits.
“You can almost think of [adaptive morphogenesis] as a form of evolution on demand,” writes Karl Ziemelis, chief physical sciences editor for Nature.
The robot differs from other amphibious robots by leveraging shape adaptation to use the same parts for propulsion in both water and land environments. Other approaches add multiple propulsive mechanisms to the same robot, using a different one in each environment, which can lead to energy inefficiencies.
“Our results show that adaptive morphogenesis can enhance the efficiency of robots that locomote through multiple environments,” says Kramer-Bottiglio.
So what do you do with a turtle- and tortoise-inspired amphibious robot? Potential applications are numerous.
Kramer-Bottiglio’s lab has focused on applications that include the monitoring of ecosystems along shorelines, diver support, and ocean farming.
The robot will also help researchers study the physics of locomotion in the complex surf zone—where waves, currents, and turbidity make it particularly tricky for robotic devices to navigate—and other environmental transition zones.
Additional coauthors are from Yale, the University of Alabama, and West Chester University.
Source: Yale University


