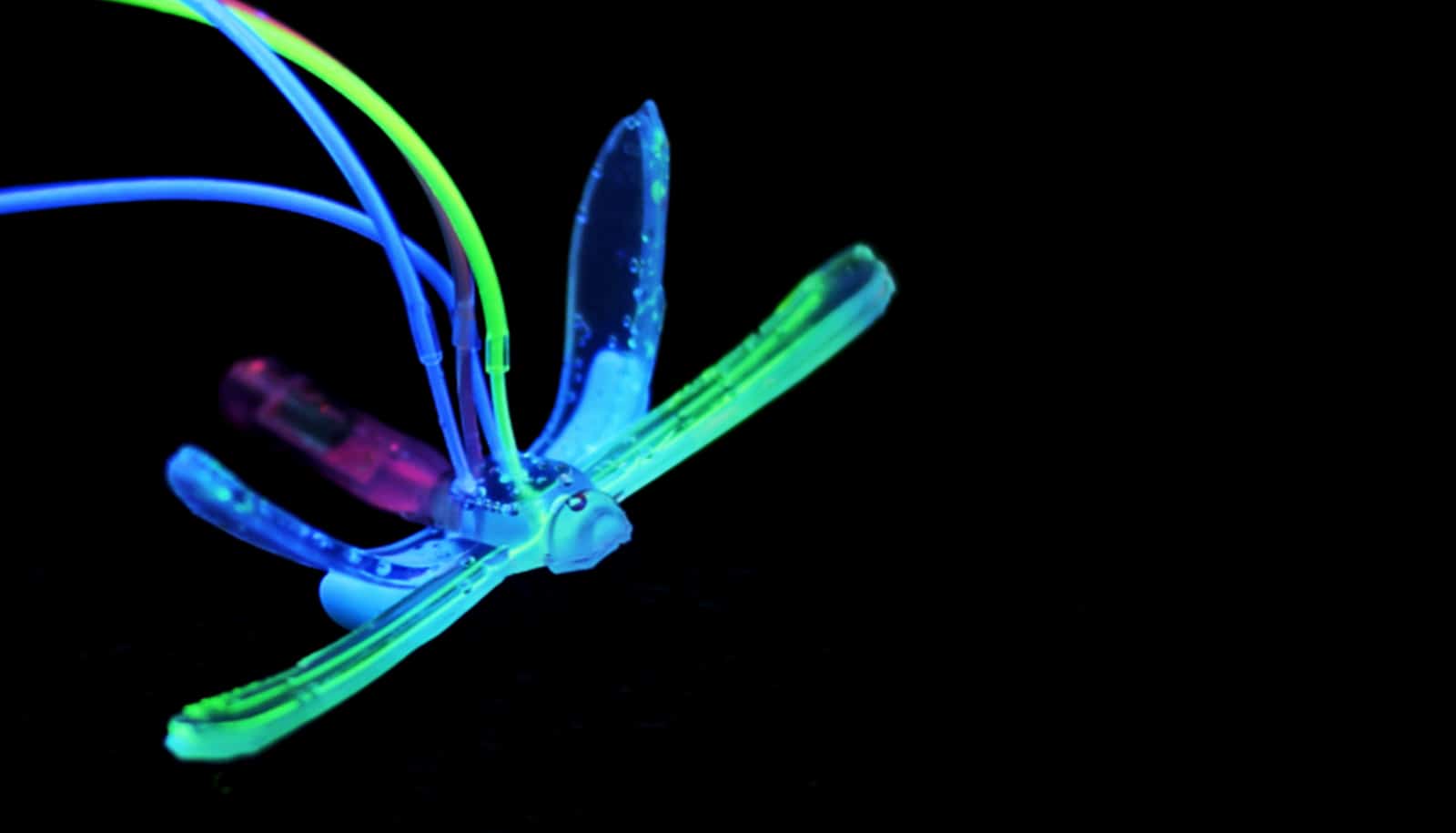
An electronics-free, entirely soft robot shaped like a dragonfly can skim across water and react to environmental conditions such as pH, temperature, or the presence of oil.
The proof-of-principle demonstration could be the precursor to more advanced, autonomous, long-range environmental sentinels for monitoring a wide range of potential telltale signs of problems.
The soft robot is described in the journal Advanced Intelligent Systems.
Soft robots are a growing trend in the industry due to their versatility. Soft parts can handle delicate objects such as biological tissues that metal or ceramic components would damage. Soft bodies can help robots float or squeeze into tight spaces where rigid frames would get stuck.
The expanding field was on the mind of Shyni Varghese, professor of biomedical engineering, mechanical engineering and materials science, and orthopaedic surgery at Duke University, when inspiration struck.
“I got an email from Shyni from the airport saying she had an idea for a soft robot that uses a self-healing hydrogel that her group has invented in the past to react and move autonomously,” says Vardhman Kumar, a PhD student in Varghese’s laboratory and first author of the paper. “But that was the extent of the email, and I didn’t hear from her again for days. So the idea sort of sat in limbo for a little while until I had enough free time to pursue it, and Shyni said to go for it.”
In 2012, Varghese and her laboratory created a self-healing hydrogel that reacts to changes in pH in a matter of seconds. Whether it be a crack in the hydrogel or two adjoining pieces “painted” with it, a change in acidity causes the hydrogel to form new bonds, which are completely reversible when the pH returns to its original levels.
Varghese’s hastily written idea was to find a way to use this hydrogel on a soft robot that could travel across water and indicate places where the pH changes. Along with a few other innovations to signal changes in its surroundings, she figured her lab could design such a robot as a sort of autonomous environmental sensor.
With the help of Ung Hyun Ko, a postdoctoral fellow also in Varghese’s laboratory, Kumar began designing a soft robot based on a fly. After several iterations, the pair settled on the shape of a dragonfly engineered with a network of interior microchannels that allow it to be controlled with air pressure.
They created the body—about 2.25 inches long with a 1.4-inch wingspan—by pouring silicon into an aluminum mold and baking it. The team used soft lithography to create interior channels and connected with flexible silicon tubing.
DraBot was born.
“Getting DraBot to respond to air pressure controls over long distances using only self-actuators without any electronics was difficult,” says Ko. “That was definitely the most challenging part.”
DraBot works by controlling the air pressure coming into its wings. Microchannels carry the air into the front wings, where it escapes through a series of holes pointed directly into the back wings. If both back wings are down, the airflow is blocked, and DraBot goes nowhere. But if both wings are up, DraBot goes forward.
To add an element of control, the team also designed balloon actuators under each of the back wings close to DraBot’s body. When inflated, the balloons cause the wings to curl upward. By changing which wings are up or down, the researchers tell DraBot where to go.
“We were happy when we were able to control DraBot, but it’s based on living things,” says Kumar. “And living things don’t just move around on their own, they react to their environment.”
That’s where self-healing hydrogel comes in. By painting one set of wings with the hydrogel, the researchers were able to make DraBot responsive to changes in the surrounding water’s pH. If the water becomes acidic, one side’s front wing fuses with the back wing. Instead of traveling in a straight line as instructed, the imbalance causes the robot to spin in a circle. Once the pH returns to a normal level, the hydrogel “un-heals,” the fused wings separate, and DraBot once again becomes fully responsive to commands.
To beef up its environmental awareness, the researchers also leveraged the sponges under the wings and doped the wings with temperature-responsive materials. When DraBot skims over water with oil floating on the surface, the sponges will soak it up and change color to the corresponding color of oil. And when the water becomes overly warm, DraBot’s wings change from red to yellow.
The researchers believe these types of measurements could play an important part in an environmental robotic sensor in the future. Responsiveness to pH can detect freshwater acidification, which is a serious environmental problem affecting several geologically-sensitive regions. The ability to soak up oils makes such long-distance skimming robots an ideal candidate for early detection of oil spills. Changing colors due to temperatures could help spot signs of red tide and the bleaching of coral reefs, which leads to decline in the population of aquatic life.
The team also sees many ways that they could improve on their proof-of-concept. Wireless cameras or solid-state sensors could enhance the capabilities of DraBot. And creating a form of onboard propellant would help similar bots break free of their tubing.
“Instead of using air pressure to control the wings, I could envision using some sort of synthetic biology that generates energy,” says Varghese. “That’s a totally different field than I work in, so we’ll have to have a conversation with some potential collaborators to see what’s possible. But that’s part of the fun of working on an interdisciplinary project like this.”
The researchers mostly performed this work at Shared Materials and Instrumentation facility (SMIF) at Duke University, a core facility supported by the National Science Foundation as part of the National Nanotechnology Coordinated Infrastructure (NNCI).
Source: Duke University


